
機器人障礙檢測控制板電子設計
日期:2019-05-11 / 人(ren)氣: / 來源:www.scqhky.com
機器(qi)(qi)人障(zhang)礙檢(jian)測系(xi)統控(kong)制板(ban)關(guan)系(xi)著運動的(de)智能化程(cheng)度,本案(an)例(li)中的(de)機器(qi)(qi)人障(zhang)礙檢(jian)測控(kong)制方(fang)案(an)基(ji)于ARM處理器(qi)(qi)、視覺傳感器(qi)(qi)設計。
系統總體方案設計
根據系(xi)(xi)統(tong)的功能需(xu)求,設計了以嵌入式系(xi)(xi)統(tong)為核心,以ARM處理器為主控制器,以視覺(jue)傳感器檢測障(zhang)(zhang)礙的機器人障(zhang)(zhang)礙檢測系(xi)(xi)統(tong)方(fang)案(an)。機器人障(zhang)(zhang)礙檢測系(xi)(xi)統(tong)總體方(fang)案(an)框圖(tu)的整體框如(ru)圖(tu)
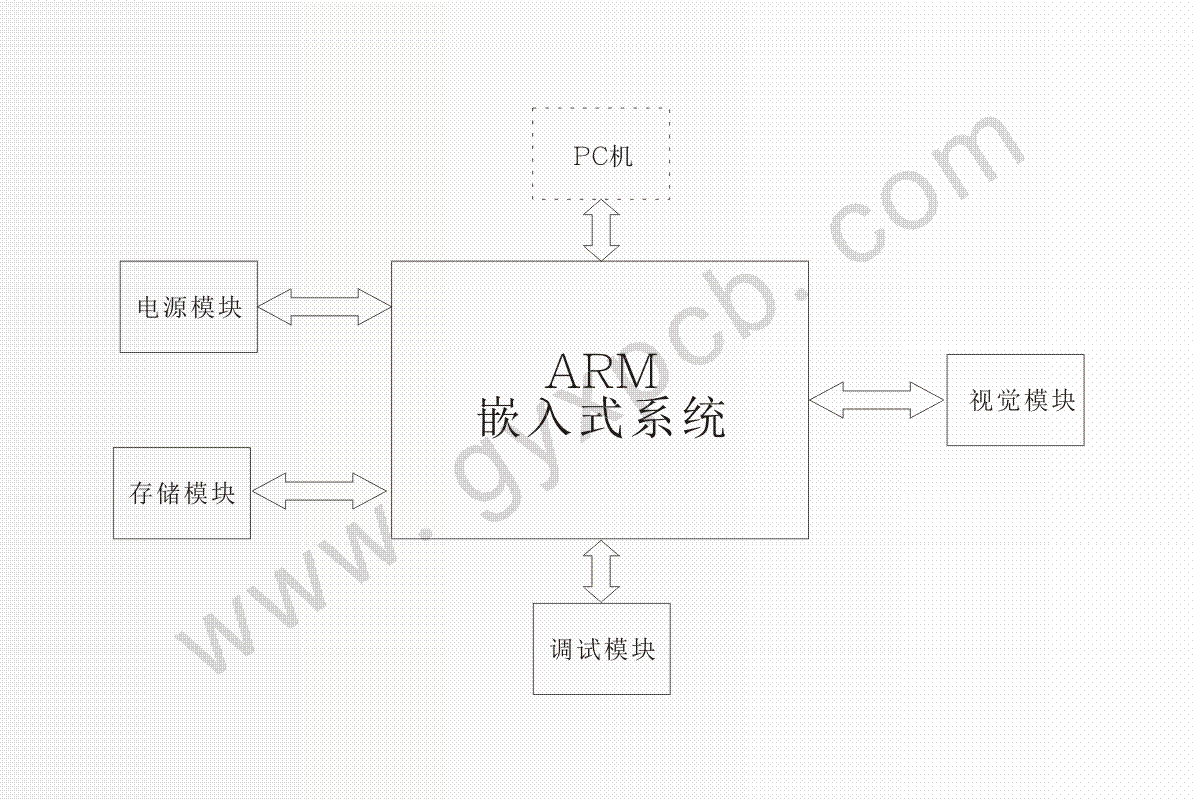
機器人障礙檢測(ce)系(xi)(xi)統整(zheng)體(ti)結構由ARM嵌(qian)入(ru)式系(xi)(xi)統、視覺(jue)模(mo)(mo)(mo)塊(kuai)、電源模(mo)(mo)(mo)塊(kuai)、存(cun)儲模(mo)(mo)(mo)塊(kuai)、調(diao)試(shi)模(mo)(mo)(mo)塊(kuai)組(zu)成。ARM嵌(qian)入(ru)式系(xi)(xi)統作為(wei)系(xi)(xi)統的(de)核心部分,主要(yao)負責(ze)協調(diao)系(xi)(xi)統各模(mo)(mo)(mo)塊(kuai)的(de)運(yun)行;清(qing)潔運(yun)行中需要(yao)時刻感知(zhi)環境信(xin)息(xi),通(tong)(tong)過視覺(jue)模(mo)(mo)(mo)塊(kuai)進行視頻(pin)圖(tu)像(xiang)采集,將采集的(de)圖(tu)像(xiang)存(cun)放在(zai)存(cun)儲模(mo)(mo)(mo)塊(kuai),經(jing)過嵌(qian)入(ru)式系(xi)(xi)統處理,實現(xian)(xian)清(qing)潔的(de)障礙檢測(ce)。電源模(mo)(mo)(mo)塊(kuai)提供系(xi)(xi)統各模(mo)(mo)(mo)塊(kuai)的(de)電源需求。調(diao)試(shi)模(mo)(mo)(mo)塊(kuai)通(tong)(tong)過調(diao)試(shi)工具實現(xian)(xian)系(xi)(xi)統的(de)開發調(diao)試(shi)。RS232接口(kou)作為(wei)PC機與嵌(qian)入(ru)式系(xi)(xi)統串口(kou)通(tong)(tong)訊(xun)接口(kou)。
視覺障礙檢測方案設計
由(you)于全景(jing)下的障(zhang)礙(ai)檢(jian)測算法復(fu)雜度高(gao)、難度大、硬(ying)件設備(bei)要(yao)求高(gao)、開發周期長等因素,本(ben)文(wen)基于局部(bu)區域的視(shi)覺傳(chuan)感器障(zhang)礙(ai)檢(jian)測。在局部(bu)區域內,一般障(zhang)礙(ai)物與地(di)面(mian)有非(fei)常明顯的交界(jie)線,因此本(ben)文(wen)通過檢(jian)測障(zhang)礙(ai)物與地(di)面(mian)交界(jie)線的這一顯著特征進行障(zhang)礙(ai)檢(jian)測。
視覺障礙檢測整體方案
視(shi)覺模塊主(zhu)要任務是通過單(dan)目視(shi)覺進行障礙檢(jian)測,視(shi)覺障礙檢(jian)測的整體(ti)結構示意圖如圖。
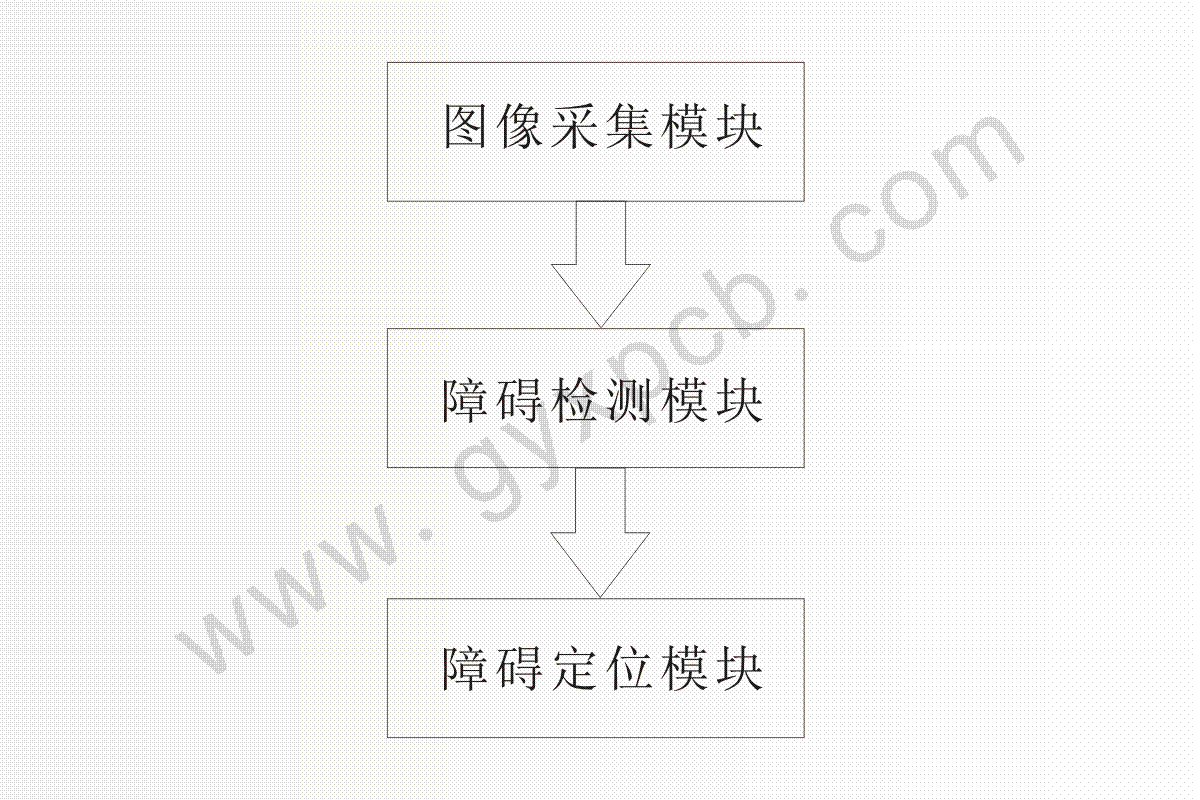
視覺模(mo)(mo)塊子系(xi)統主要包(bao)括圖像(xiang)采(cai)集模(mo)(mo)塊、障(zhang)礙(ai)檢測模(mo)(mo)塊及障(zhang)礙(ai)定位(wei)模(mo)(mo)塊。
1. 圖像采集(ji)模塊。通(tong)過視(shi)覺(jue)傳感器采集(ji)環(huan)境信息(xi),是清潔障(zhang)礙(ai)檢測的(de)前提工作。
2. 障礙檢測模塊。實現檢測障礙功能(neng),通過圖像處(chu)理及理解等(deng)方法,檢測環(huan)境中是(shi)否存在障礙物(wu)。
3. 障(zhang)礙(ai)定位模塊。實現障(zhang)礙(ai)物的測(ce)(ce)距功能,通過(guo)攝像(xiang)機(ji)成像(xiang)模型方(fang)法,完成對障(zhang)礙(ai)物的測(ce)(ce)距定位。
障礙檢測及定位模塊實現方案
在局部區(qu)域內,一般障礙(ai)物與(yu)地面具有(you)明顯的交(jiao)界(jie)線(xian),因此,可以通過(guo)檢(jian)測(ce)交(jiao)界(jie)線(xian)進行障礙(ai)檢(jian)測(ce)障礙(ai)檢(jian)測(ce)基(ji)本流程圖如圖。
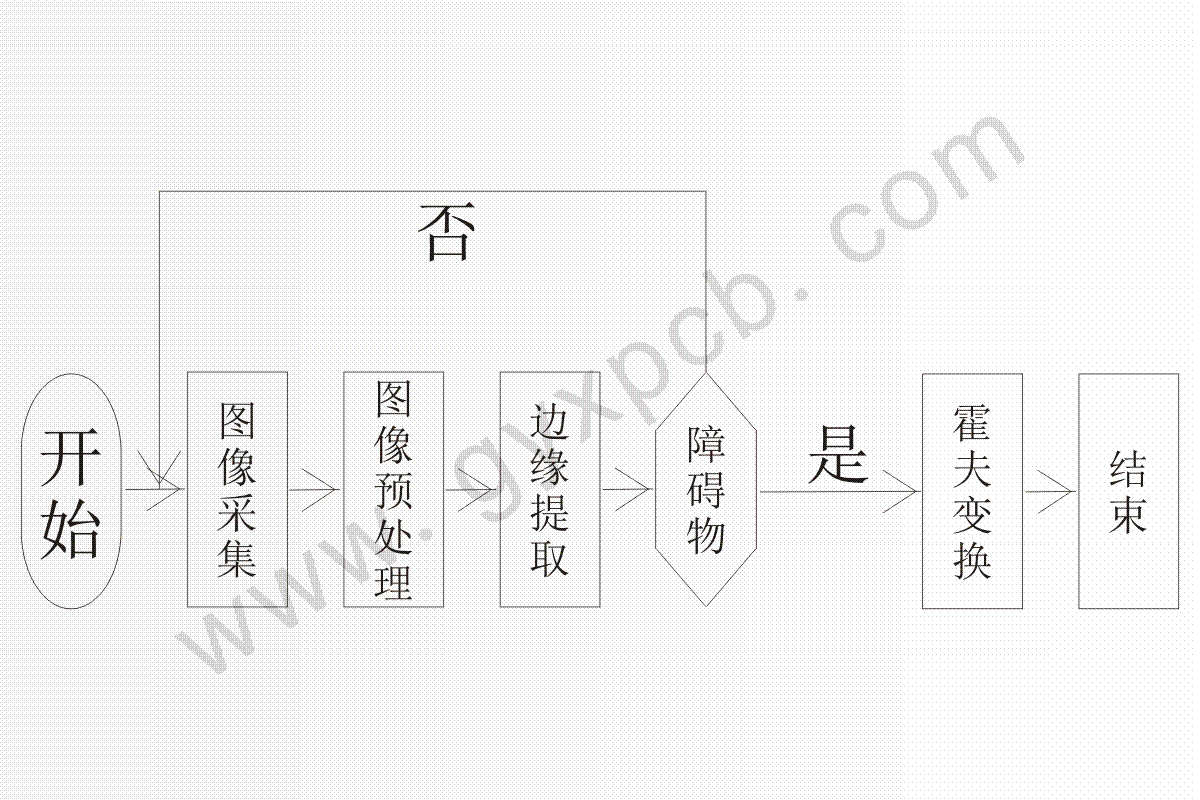
首先對原始圖(tu)像(xiang)進(jin)行圖(tu)像(xiang)預處理,其次(ci)通(tong)過(guo)邊緣檢測方法提取障(zhang)礙與地(di)面的交界線特征,然后判斷是否存在障(zhang)礙物(wu)(wu),如果存在障(zhang)礙物(wu)(wu),最后通(tong)過(guo)Hough變換(huan)標示出障(zhang)礙物(wu)(wu)區域。
障礙定位模塊實現方案
障(zhang)礙(ai)定位(wei)模(mo)(mo)塊的(de)功(gong)(gong)能是實(shi)現(xian)(xian)障(zhang)礙(ai)物(wu)的(de)位(wei)置測量,本(ben)文根據攝像機透視成(cheng)像模(mo)(mo)型的(de)方(fang)法進行測距(ju),該模(mo)(mo)型將(jiang)圖(tu)像坐標轉換成(cheng)世界坐標,實(shi)現(xian)(xian)障(zhang)礙(ai)物(wu)的(de)定位(wei)功(gong)(gong)能。
透視模型是(shi)最常用的攝像機投影模型,可以用小孔(kong)成像模型簡化如圖。
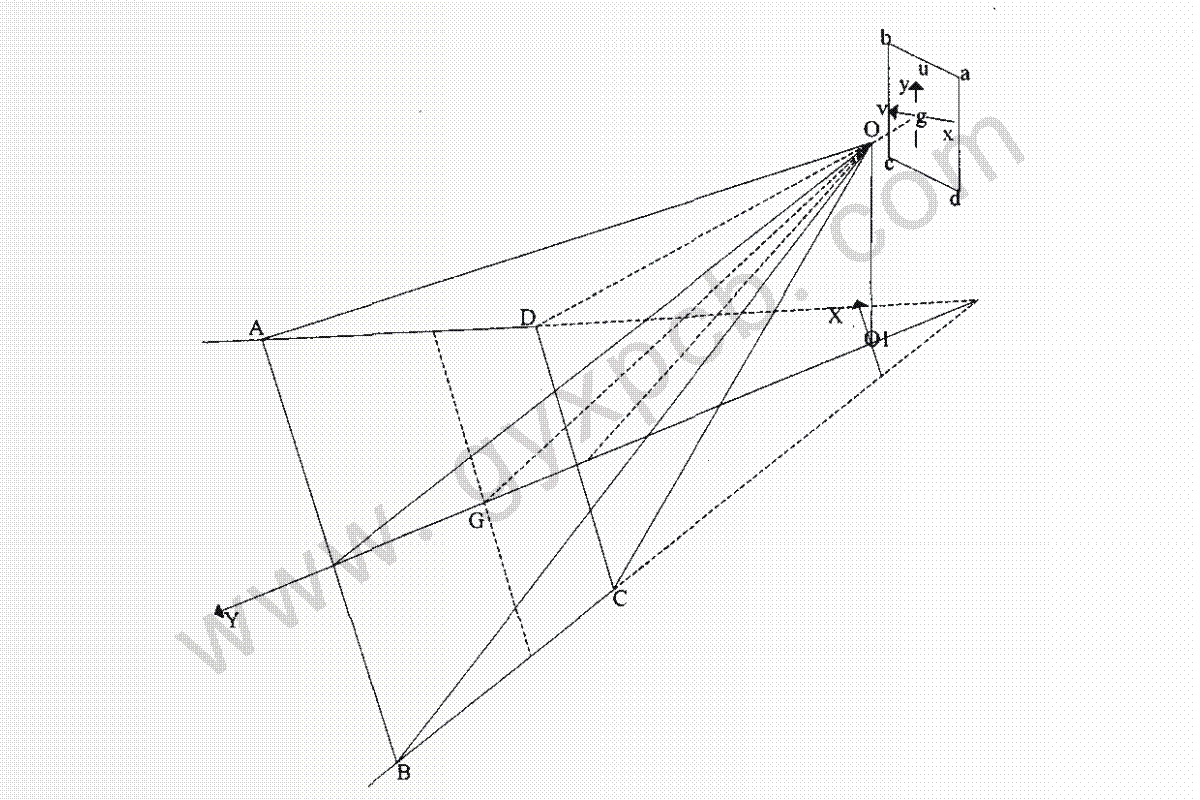
ABCD為(wei)(wei)攝像機(ji)(ji)拍攝到(dao)的(de)地面(mian)(mian)上梯形區域,O點(dian)為(wei)(wei)攝像機(ji)(ji)鏡(jing)頭中心點(dian),G點(dian)為(wei)(wei)攝像機(ji)(ji)光軸(zhou)和地面(mian)(mian)的(de)交點(dian),O點(dian)為(wei)(wei)O點(dian)在地平面(mian)(mian)上的(de)垂直投影。a、b、C、d、g分別(bie)為(wei)(wei)A、B、C、D、G在圖像平面(mian)(mian)的(de)對(dui)應(ying)點(dian)。
軟硬件整體設計
硬件總體設計
根據系統的(de)總體(ti)方(fang)案(an),為實現嵌入式(shi)系統的(de)功能,提(ti)出了滿(man)足系統需求的(de)硬件總體(ti)設計方(fang)案(an),其整體(ti)框圖如圖。
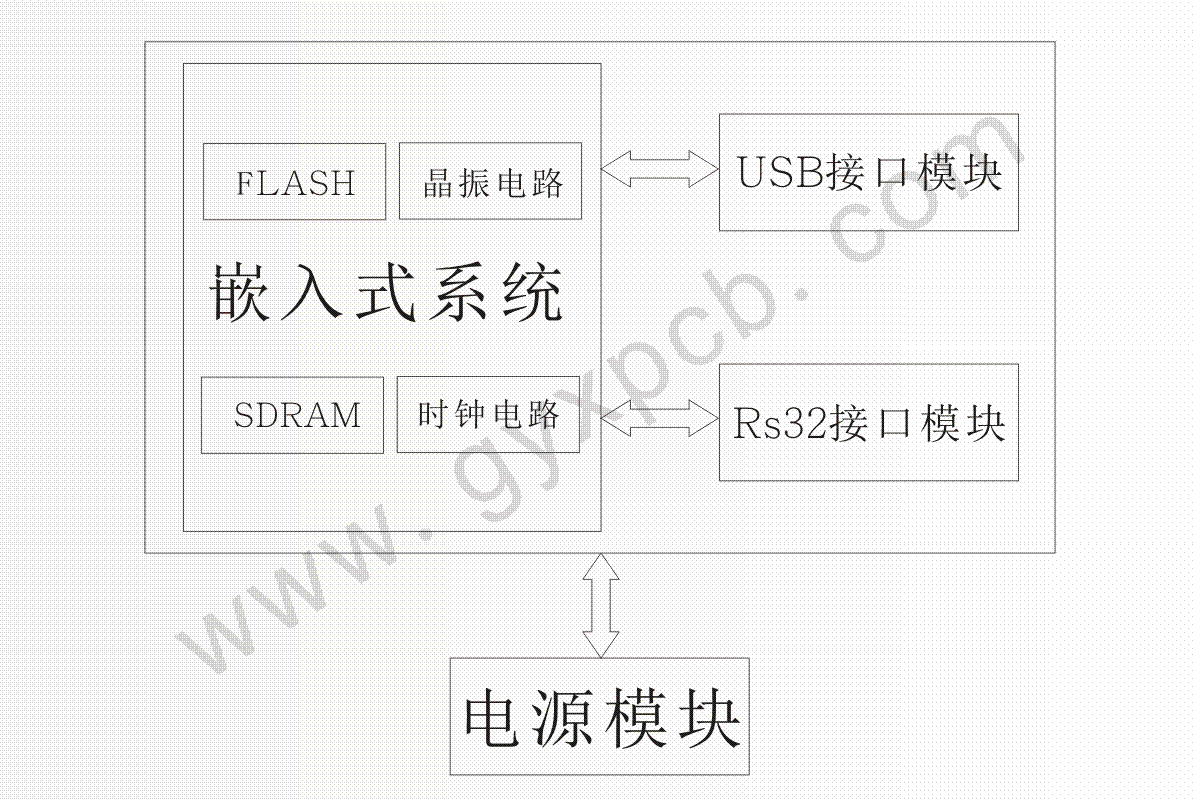
根據(ju)系(xi)統功能需求(qiu)及(ji)模(mo)(mo)塊化(hua)結(jie)構設計的思想,機器人障礙(ai)檢測控制系(xi)統硬件模(mo)(mo)塊設計是:
1. 嵌入式最(zui)小系統(tong)模塊,包括晶振電路、時(shi)鐘電路、Flash、SDRAM電路等(deng)。
2. USB接(jie)口(kou)模(mo)塊(kuai),該模(mo)塊(kuai)主(zhu)要是通過USB外接(jie)USB攝像頭進(jin)行(xing)圖像采集與(yu)圖片(pian)傳輸。
3. RS232接(jie)口模塊,該模塊實(shi)現宿主機與目標機的串口通(tong)訊,進(jin)行嵌入式系(xi)統開發(fa)。
4. 電源模塊,該模塊為系統各芯(xin)片及元(yuan)器件提供所需電源。
軟件總體設計
系統采(cai)用Linux嵌(qian)入式操作(zuo)系統作(zuo)為S3C244O軟件(jian)開發平臺(tai),軟件(jian)設(she)計(ji)主要包括圖(tu)像采(cai)集程序(xu)、圖(tu)像處理及(ji)障礙定位(wei)程序(xu)設(she)計(ji),主程序(xu)的流程如圖(tu)。
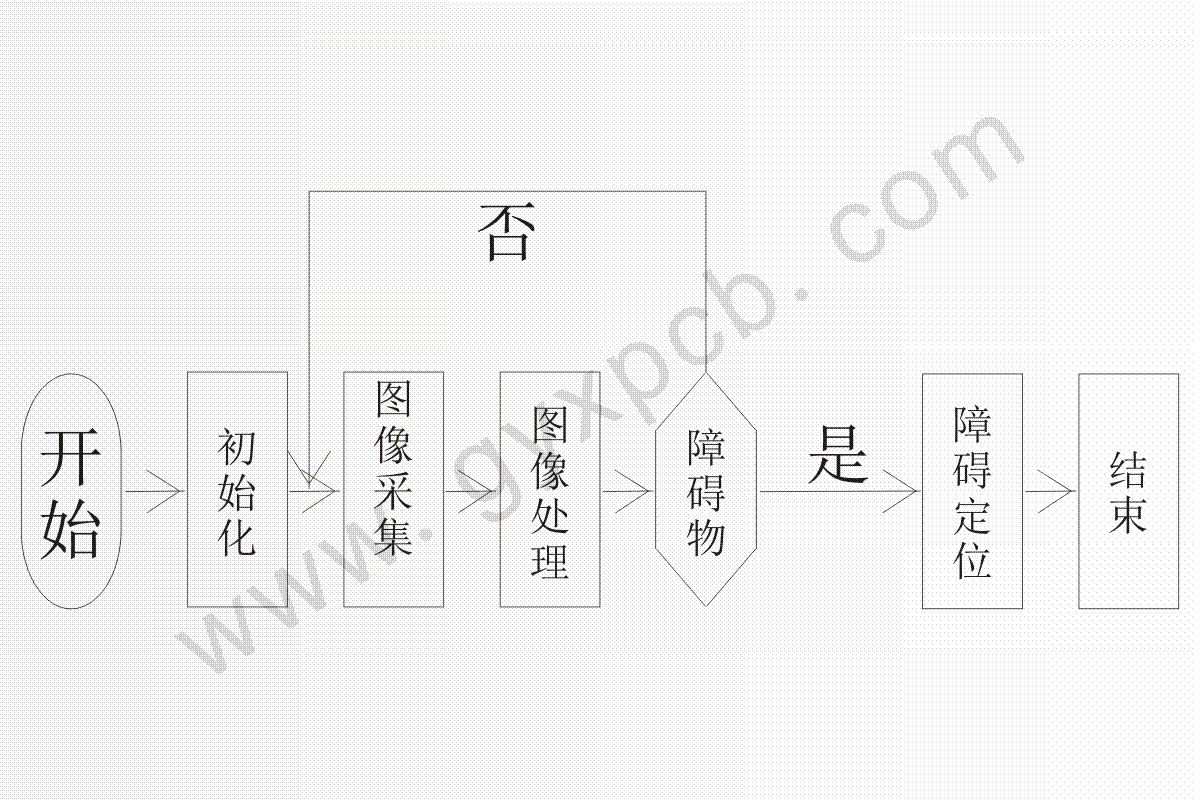
1)圖像采集程序設計。基(ji)于Video4Linux2API。Linux系(xi)統(tong)(tong)中(zhong)的視頻(pin)(pin)子系(xi)統(tong)(tong)Video4Linux為視頻(pin)(pin)應(ying)用(yong)程序提供了一套統(tong)(tong)一的API,視頻(pin)(pin)應(ying)用(yong)程序通(tong)過標(biao)準的系(xi)統(tong)(tong)調用(yong)即可操(cao)作各種(zhong)不(bu)同的視頻(pin)(pin)捕(bu)獲設備。
2)圖(tu)像處理程序(xu)設計(ji)。根據系統的(de)(de)障礙檢測(ce)算法,設計(ji)出(chu)能夠實現障礙檢測(ce)的(de)(de)軟件程序(xu)。
3)障(zhang)礙定(ding)位程序設計。根據(ju)系統的障(zhang)礙定(ding)位方案,提取出圖像坐標,進而轉換成世界坐標系實現(xian)障(zhang)礙物的定(ding)位功能。
PCBA加工產能
| 制造能力 | PCBA服務 | 設備清單 |
| 4條SMT生產線 | 電路板類型(盲埋孔、阻抗、厚銅、HDI) | Fuji CP8 Series SMT貼片機 |
| 2條DIP插件生產線 | 工藝類別(SMT/DIP) | 全自動錫膏印刷機 |
| 0201元件貼裝 | ICT測試 | 10溫區回流焊 |
| 0.25mm BGA | FCT功能測試 | AOI光學檢測儀 |
| SMT 400萬點/日 | BIT老化測試 | 波峰焊(有鉛、無鉛) |
| DIP 100萬點/日 | Box Building成品組裝 | ICT測試工作臺 |
PCBA工藝能力
| 項目 | 批量加工 | 打樣 | ||
| PCBA加工SMT工藝能力 | 長*寬 | 最小尺寸 | 50*30 | |
| 最大尺寸 | 150*350 | 最大邊長低于800mm | ||
| 厚度 | 最低厚度 | 0.8 | ||
| 最高厚度 | 5 | |||
| PCBA加工DIP工藝能力 | 長*寬 | 最小尺寸 | 50*30 | |
| 最大尺寸 | 500*350 | 最大邊長低于1000mm | ||
| 厚度 | 最低厚度 | 0.8 | ||
| 最高厚度 | 5 | |||
| PCBA貼片加工元件規格 | 規格大小 | 最小規格 | 0603(0201) 0402() | |
| 最大尺寸 | 45*45 | 68*68 | ||
| 元件厚度 | 25.4 | |||
| QFP封裝 | 最小腳距 | 0.4 | 0.3 | |
| BGA封裝 | 最小腳距 | 0.5 | 0.3 | |
PCBA交期說明
| 項目 | 加工數量 | ||
| 少于100件 | 100-1000件 | 多于1000件 | |
| 交期 | 少于3天 | 少于5天 | 3天開始交貨 |
| 備注 |
SMT快件最快8小時交付; 合(he)格(ge)率保證在99%以上; 交期計算從(cong)客(ke)戶資料、物料確(que)認完(wan)畢后開(kai)始計算 |
||
【格亞信電子】是專業從事電子產品設計、電子方案開發、電子產品PCBA加工的深圳電子(zi)方案公司(si),主(zhu)要設計電子(zi)產(chan)品包(bao)括工控、汽車、電源(yuan)、通信、安(an)防、醫療(liao)電子(zi)產(chan)品開發(fa)。
公(gong)司核(he)心業(ye)務是提(ti)供以工(gong)(gong)控(kong)電(dian)(dian)(dian)子(zi)(zi)(zi)(zi)、汽(qi)車電(dian)(dian)(dian)子(zi)(zi)(zi)(zi)、醫療電(dian)(dian)(dian)子(zi)(zi)(zi)(zi)、安防電(dian)(dian)(dian)子(zi)(zi)(zi)(zi)、消費電(dian)(dian)(dian)子(zi)(zi)(zi)(zi)、通訊電(dian)(dian)(dian)子(zi)(zi)(zi)(zi)、電(dian)(dian)(dian)源電(dian)(dian)(dian)子(zi)(zi)(zi)(zi)等多領(ling)域的電(dian)(dian)(dian)子(zi)(zi)(zi)(zi)產品設(she)計(ji)、方案開發及加工(gong)(gong)生(sheng)產的一(yi)站(zhan)式PCBA服務,為滿足不(bu)同客戶需求可提(ti)供中小批量PCBA加工(gong)(gong)。
公司產品涵蓋工(gong)(gong)(gong)業(ye)生產設(she)備控(kong)(kong)制(zhi)設(she)備電(dian)子(zi)(zi)開(kai)發、汽車MCU電(dian)子(zi)(zi)控(kong)(kong)制(zhi)系統(tong)方案(an)設(she)計、伺服(fu)控(kong)(kong)制(zhi)板(ban)PCBA加(jia)(jia)工(gong)(gong)(gong)、數控(kong)(kong)機床主(zhu)板(ban)PCBA加(jia)(jia)工(gong)(gong)(gong),智能家居電(dian)子(zi)(zi)研發、3D打印(yin)機控(kong)(kong)制(zhi)板(ban)PCBA加(jia)(jia)工(gong)(gong)(gong)等領(ling)域。業(ye)務流程包括電(dian)子(zi)(zi)方案(an)開(kai)發設(she)計、PCB生產、元(yuan)器(qi)件采購、SMT貼(tie)片加(jia)(jia)工(gong)(gong)(gong)、樣機制(zhi)作調試、PCBA中小批量加(jia)(jia)工(gong)(gong)(gong)生產、后期質保維護一站式PCBA加(jia)(jia)工(gong)(gong)(gong)服(fu)務。
http://www.scqhky.com/
作者:控制板
相關方案
- 櫻花草視頻:電弧焊機主板PCBA加工04-13
- 櫻花草視頻:車載影音設備PCBA加工04-01
- 櫻花草視頻:信號發生器PCBA方案加工06-09
- 櫻花草視頻:SMT貼片加工產品03-30
- 櫻花草視頻:變頻電源控制系統PCBA加工04-05
- 櫻花草視頻:GPRS DTU數據傳輸單元06-20
- 櫻花草視頻:行車記錄儀控制板PCBA加工04-01
- 櫻花草視頻:模擬射頻高速數字板PCB設計案例06-26
- 櫻花草視頻:手機無線充電方案設計07-10
- 櫻花草視頻:高精密度十層板手機板PCB設計06-26
相關技術
- 櫻花草視頻:PCBA加工元件的布局設計需參考內容05-27
- 櫻花草視頻:格亞信PCBA加工元器件來料可焊性測10-18
- 櫻花草視頻:電子產品三防設計的技術措施05-26
- 櫻花草視頻:電子產品結構設計的要求與原則及05-26
- 櫻花草視頻:PCBA清洗劑怎樣選擇,不同類型PCB07-21
- 櫻花草視頻:PCBA運輸與存儲操作規范03-29
- 櫻花草視頻:PCBA加工印刷缺陷產生的原因及缺陷05-27
- 櫻花草視頻:從新能源汽車看中國制造如何崛起10-14
- 櫻花草視頻:格亞信PCBA加工PCB的工藝質量控制要05-27
- 櫻花草視頻:PCB電路板外觀檢測標準,電路板怎05-26